Cara menggerakkan dua motor servo menggunakan Arduino
Di artikel-artikel lain mungkin sudah banyak yang membahas mengenai cara menggerakkan motor servo menggunakan Arduino, tetapi tidak ada salahnya juga saya membahasnya kembali di blog saya ? :D
Dalam artikel ini saya akan membahas mengenai bagaimana cara menggerakkan 2 buah motor servo, hal ini saya bahas karena pengalaman saya yang pernah mencoba menggerakkan 2 servo sekaligus, tetapi pergerakan yang dihasilkan tidak beraturan, berbeda ketika saya menggerakkan 1 buah servo saja. Hal ini bisa saja disebabkan karena kita menggunakan daya untuk motor servo tersebut langsung dari board Arduino, sehingga pada saat motor servo menyala secara bersamaan, tegangan dari board Arduino menjadi tidak stabil.
Setelah saya coba menggunakan sumber tegangan external untuk servo (tidak menggunakan daya dari board Arduino langsung) dengan cara menggunakan battery sebagai tegangan untuk servo dan charger Handphone untuk tegangan Arduino, seperti Skema yang dapat dilihat pada Gambar berikut
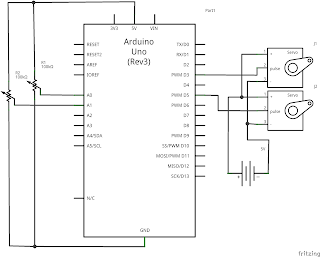
pin D3 -> pin data (Servo 1)
pin D5 -> pin data (Servo 2)
pin VCC dan GND pada Servo 1 dan Servo 2 dihubungkan dengan battery
pin A0 -> pin wiper (potensiometer 1)
pin A1 -> pin Wiper (potensiometer 2)
Program yang saya buat adalah sebagai berikut
Pembahasan program
pada program diatas terdapat sebuah perintah val1 = map(val1, 0, 1023, 0, 180);. Perintah ini digunakan untuk membuat skala dari 0 – 1023 menjadi 0 – 180, artinya meskipun potensio diputar secara penuh maka nilai yang dihasilkan adalah 180, kenapa kita harus merubahnya menjadi 180 ?. hal ini karena rata-rata motor Servo hanya dapap berputar sebanyak 180 derajat saja.
Dalam artikel ini saya akan membahas mengenai bagaimana cara menggerakkan 2 buah motor servo, hal ini saya bahas karena pengalaman saya yang pernah mencoba menggerakkan 2 servo sekaligus, tetapi pergerakan yang dihasilkan tidak beraturan, berbeda ketika saya menggerakkan 1 buah servo saja. Hal ini bisa saja disebabkan karena kita menggunakan daya untuk motor servo tersebut langsung dari board Arduino, sehingga pada saat motor servo menyala secara bersamaan, tegangan dari board Arduino menjadi tidak stabil.
Setelah saya coba menggunakan sumber tegangan external untuk servo (tidak menggunakan daya dari board Arduino langsung) dengan cara menggunakan battery sebagai tegangan untuk servo dan charger Handphone untuk tegangan Arduino, seperti Skema yang dapat dilihat pada Gambar berikut
pin D3 -> pin data (Servo 1)
pin D5 -> pin data (Servo 2)
pin VCC dan GND pada Servo 1 dan Servo 2 dihubungkan dengan battery
pin A0 -> pin wiper (potensiometer 1)
pin A1 -> pin Wiper (potensiometer 2)
Program yang saya buat adalah sebagai berikut
Pembahasan program
pada program diatas terdapat sebuah perintah val1 = map(val1, 0, 1023, 0, 180);. Perintah ini digunakan untuk membuat skala dari 0 – 1023 menjadi 0 – 180, artinya meskipun potensio diputar secara penuh maka nilai yang dihasilkan adalah 180, kenapa kita harus merubahnya menjadi 180 ?. hal ini karena rata-rata motor Servo hanya dapap berputar sebanyak 180 derajat saja.
ceritanya saya ingin membuat sebuah prototype robot Scara yang dapat digerakkan dengan menggunakan potensio :D , tapi hasilnya masih berantakan hahahaha....
sumber : https://papermindvention.blogspot.com/
Komentar
Posting Komentar